
{kind=link}
Otonom Arabalar Neden Mümkün Değil?
Tesla’nın değerinin 1 trilyon doları aşmasında piyasa şartları dışında otonom araç teknolojisinin ortaya çıkmasının beklenmesinin de etkisi olduğu açık. Peki otonom arabaların ARGE’si için milyarlarca dolar harcanırken hala yollarda otonom bir araç görmememizin nedeni nedir? Hem de Elon Musk’ın 2020’de otonom arabaların kesin yollarda olacağını söylemesine rağmen. (Bu yazı yazıldığında Sn. Musk Twitter’ı da alacağını açıklamıştı)
Bu durumun yasalarla, etikle, insan davranışlarıyla ilgili farklı cevaplarını bulabilirsiniz. Ancak tüm nedenler aslında yapay zekâ ve sensörlerin matematiğiyle açıklanabilir. Bu yazıda ortaokul düzeyindeki matematikle yapay zekanın neden otonom arabalarda kullanılamayacağını açıklamaya çalışacağız.
Yapay zekanın birçok tanımı bulunmaktadır. Bu yazı kapsamında nasıl çalıştığı ne olduğundan daha önemli olduğundan konunun felsefesine girip yeni bir tanım yapmak yerine Vikipedi’deki “makinalardaki zekâ çeşididir” deyip geçelim. Yapay zekâ aslında algoritmalardır ve bilgisayar donanımı üzerinde koşarlar. Dünyanın en çok çalışılan konularından birisi olan yapay zekâ alanında algoritmalar tabi ki çok farklı şekillerde çalışabilirler. Ama temelde her şey bir anahtar kelime üzerine kuruludur: İnterpolasyon.
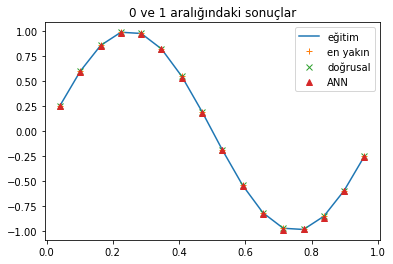
Yapay zekâ, insan zekasından farklı olarak daha önce görmediği durumlarda ancak bu durumlar öncekilere benziyorsa çalışır. Diyelim ki kedi resimleriyle köpek resimlerini birbirinden ayırmak istiyorsunuz. Bunun için yapay zekayı kedi ve köpek resimleriyle eğittiniz. Algoritmalarınız (veya yapay zekânız) yeterince veriyle eğitildiyse bundan sonraki kedi ve köpek resimlerini doğru adlandıracaktır. Bu durumun matematiksel olarak aşağıdaki şekilde sinüs fonksiyonu için yapılandan pek farkı yoktur. Burada da [0,1] aralığındaki 11 farklı değerle (0.0, 0.1, 0.2, …, 1.0) 3 farklı algoritma eğitilmiştir. Görüldüğü gibi verilen değerle bu en basit algoritmalar bile insan gözü için doğru sonuçlar vermektedir. Yani algoritmamıza 0.35’in karşılığını sorduğumuzda oldukça doğru, en azından göze saçma görünmeyen, yanıtlar almaktayız.
Peki o zaman yapay zekâmız nerede yanılmakta ve bizi de yanıltmaktadır?
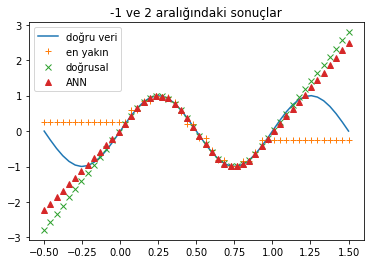
Sorun kedi ve köpekleri tanımak için eğitilmiş olan yapay zekamıza kaplan resmi gösterdiğimizde ortaya çıkmaya başlamaktadır. Biraz önceki örnek üzerinden ilerlersek [0,1] aralığındaki değerlerle eğitilmiş olan yapay zekamıza 1.2 değeri vermiş oluruz. Bunun sonucu sinüs gibi basit bir fonksiyon için öngörülebilir. Aşağıda da görüleceği gibi basit bir sinüs fonksiyonu için bile sonuçlar saçma çıkmaya başlar. Peki kuş resmi gösterdiğimizde ne olacaktır? Bu [0,1] aralığından daha da uzak bir değer mesela ’e karşılık gelir ki sonucun ne olacağı günümüzde geliştirilen çok daha karmaşık bir sistemlerde öngörülemez. Aslında problemimiz de zaten interpolasyon değil ekstrapolasyon adını almış olur.
Peki konunun sensörlerle ilgisi nedir?
Sensörler otonom sistemlerin gözü kulağıdır. 10 metre ötenizde bir yer belirleyip gözlerinizi kapatıp oraya doğru yürümeye çalışırsanız sensörlerin (bu durumda gözlerinizin) ne kadar önemli olduklarını siz de takdir edersiniz. Biz nasıl ki çevreye bakmadan ilerleyemiyorsak otonom araçlar da benzer şekilde sensörlerle çevreyi taramadan kendileri hakkında bilgi almadan çevreyle etkileşime geçemezler. Kendi konumlarını bile hatalı bulurlar.
Otonom araçların yapay zekâları da yine eğitilmek zorundadır. Sinüs fonksiyonu örneğimize dönersek sensör verisi olarak [0,1] aralığında değerler alırlar. Şimdi bu durumun sensörlerle ilgisinin ne olduğuna bir örnekle bakalım.
Otonom arabaların üstünde genellikle Lidar, kamera, sonar, GPS, INS ve tasarımcılar sorunların biraz farkındaysalar radar sensörleri bulunur. Bu sensörler arasında trafik ışıklarının hangi renkte yandığını anlayabilecek tek sensör kameralardır. Biz arabamızı basitleştirelim ve sadece kameralarla ilerlemeye çalışalım. Kameraları kullanarak aracınızın yapay zekasını eğittiğiniz varsayalım. Otonom araba yapma iddiasındaki Waymo arabalarının milyonlarca kilometre kat ettiğini iddia etmektedir. Arabalar fakir Kaliforniya sokaklarında hep aynı görüntülerle eğitilmektedir. Yani yine [0,1] aralığındaki değerler vermekteyiz.
Peki aynı araba Burdur’un köylerine geldiğinde ne olur? Eğitilen yapay zekâ daha önce hiç karşılaşmadığı görüntülere tepki vermek zorunda kalacaktır. Bu sorun hayatında DUR levhası görmeyen birisinin bu levhaya ne tepki vereceğini beklemekten daha ciddi bir sorundur. Zira insan beyni günümüzde kullanılan yapay zekâ algoritmalarından daha karışıktır ve daha önce karşılaşmadığı durumlara karşı daha doğru tepkiler geliştirebilir.
Böylece birinci sorunu ortaya koymuş olduk. Sensörlerden gelen veriler daha önce görülmeyen bir durumdaysa algoritmanın ne yapacağı belirsizdir. Örneği ülke meselesi olmaktan çıkaralım ve DUR levhası için eğitilen algoritmanın elinde DUR levhası taşıyan birisiyle karşılaşması durumunda ne yapacağını bilmemesi olarak yeniden sunalım. Yapay zekâ hareket eden bir DUR levhasıyla karşı karşıya kalmıştır. Bu duruma karmaşık bir yapay zekanın ne cevap vereceğini bilemeyiz.
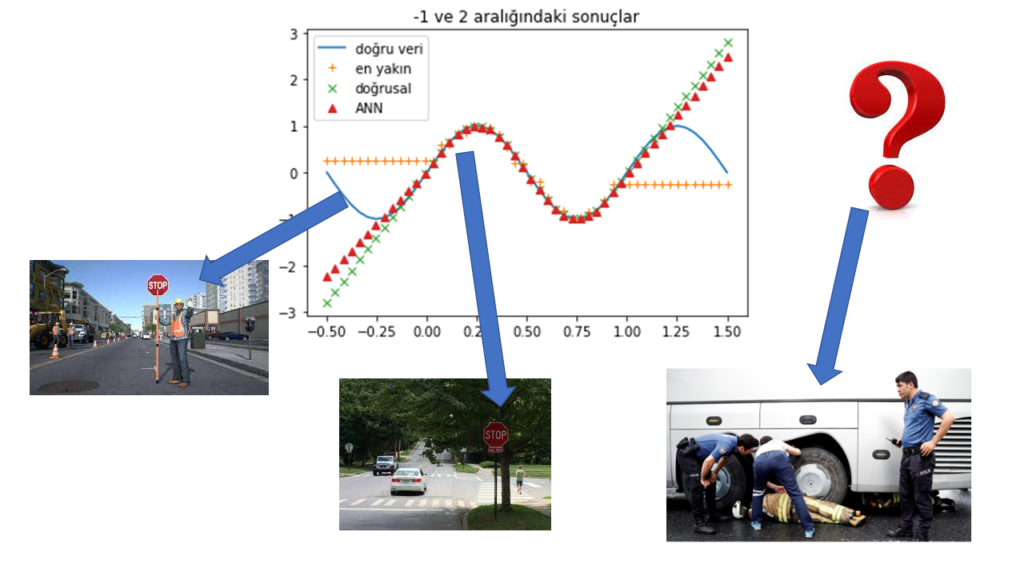
İkinci sorun için Türkiye’de yaşanan bir başka olayı örnek verebiliriz. Olay kısaca yurtdışına kaçmaya çalışan bir göçmenin otobüsün şasinin altına saklanmasıyla başlar. Motorun ısınmasıyla birlikte yanmaya başlayan adamı yolcular duymuş ve onu duyamayan şoföre bildirmişlerdir. Şasinin altından gelen çığlıkları tespit etmek için ayrı bir mikrofon konulmadığı sürece otonom bir otobüsün yapay zekâsı açısından bu tanımsız bir girdidir. Bu sadece benim karşılaştığım bir haber. Bambaşka sorunlar çıktığında çıkan her sorun için otonom araçlara yeni bir sensör konulmasının gerçekçi bir durum olup olmadığının değerlendirmesini size bırakıyorum.
Bu sıra dışı durumlar nedeniyle otonom araçlar insanların bulundukları ortamlarda kullanılabilecek olgunluğa önümüzdeki 20 yılda daha erişemeyecek gibi görünmektedir. Ancak sadece makinelerin oldukları ortamlarda hayati tehlike olmadığından kullanılmaları olası görünmektedir. Bu ise gerek etik gerekse teknolojik açıdan başka bir tartışma konusudur.